Tyrinėti ATMEGA2560 mikrovaldiklį
Atsiradęs „ATR RISC“ architektūros atstovas, „ATMEGA2560“ mikrovaldiklis yra švenčiamas dėl savo efektyvumo, vykdant galingas instrukcijas per vieną laikrodžio ciklą.Šis straipsnis pasinėrė į pagrindines ATMEGA2560 specifikacijas, įskaitant jos išplėstinę atmintį, lanksčią „Pinout“ konfigūraciją ir universalius ryšio protokolus, tokius kaip UART, SPI ir I2C.Be to, mes išnagrinėsime pastebimas jo ypatybes ir įvairias programas, pradedant robotika ir baigiant IoT, kartu su praktinėmis dizaino įžvalgomis, siekiant maksimaliai padidinti jo funkcionalumą.Nesvarbu, ar kuriate sudėtingas valdymo sistemas, ar energiją taupančius sprendimus, šis straipsnis suteiks žinių, kaip panaudoti visą „ATMEGA2560“ potencialą jūsų projektuose.Katalogas
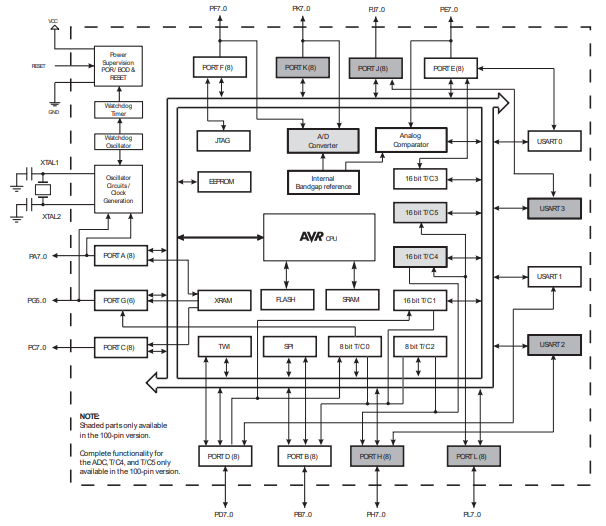
ATMEGA2560 apžvalga
Atmega2560 vaidina intalią vaidmenį kaip mikrovaldiklio „Arduino Mega 2560“ lentose, švenčiama dėl savo meistriškumo valdant tvirtas ir sudėtingas programas.Funkcija naudojant AVR RISC pagrįstą architektūrą, jis optimaliai sujungia apdorojimo greitį su energijos taupymu, vykdydamas sudėtingas komandas per vieną laikrodžio ciklą.Šis atributas nėra tik abstrakti koncepcija;Kūrėjai, priešingai, labai vertina, kad galėtų suklastoti sklandžiai interaktyvias sistemas, veikiančias realiuoju laiku.
Be savo konstrukcijos dizaino, „ATMEGA2560“ demonstruoja greito vykdymo derinį su protingu energijos vartojimu.Dėl savo judrumo tvarkant sudėtingas užduotis jis yra geidžiamas pasirinkimas energijai sąmoningiems projektams.Iš tiesų, daugelis pramonės ekspertų tinkamai panaudojo šią sinergiją, kad sukurtų energijos valdymo schemas nuo akumuliatoriaus priklausomų prietaisų, taip iš esmės prailgindami jų funkcinius laikotarpius, nesumažindami našumo.
Platus ATMEGA2560 pritaikomumas randa aidus įvairiuose sektoriuose, tokiuose kaip robotika ir ekologinė priežiūra.Jos platus integruotų periferinių įrenginių rinkinys padidina vystymosi greitį ir sumažina priklausomybę nuo papildomos aparatūros, palengvindama projektavimo kelionę.Remdamasis asmenine patirtimi, kūrėjai dažnai pripažįsta jo lankstumą kuriant modulines sistemas, reikalaujančias mastelio ir greito prototipų kūrimo;Šiuos apmąstymus nuspalvina jų pačių nuožmi aistra ir įžvalgūs vertinimai.
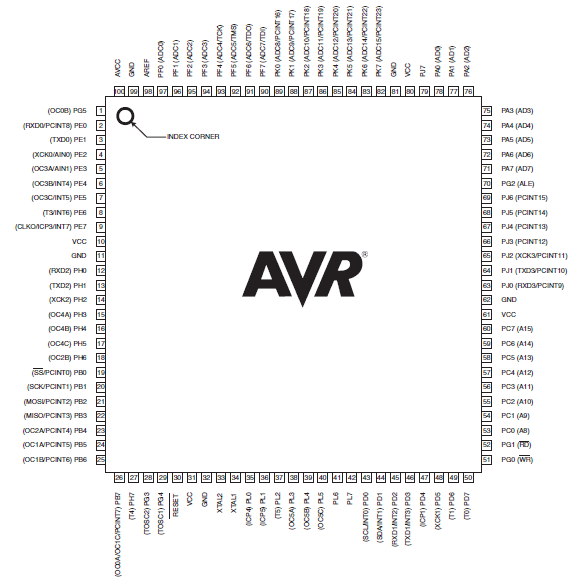
ATMEGA2560 PIN konfigūracija
|
PIN kodo numeris |
PIN vardas |
Priskirtas kaiščio pavadinimas |
|
1 |
PG5 (OC0B) |
Skaitmeninis kaištis 4 (PWM) |
|
2 |
PE0 (rxd0/pcint8) |
Skaitmeninis kaištis 0 (RX) |
|
3 |
PE1 (txd0) |
Skaitmeninis kaištis 1 (TX) |
|
4 |
PE2 (xck0/ain0) |
|
|
5 |
PE3 (OC3A/AIN1) |
Skaitmeninis kaištis 5 (PWM) |
|
6 |
PE4 (OC3B/INT4) |
2 skaitmeninis kaištis (PWM) |
|
7 |
PE5 (OC3C/INT5) |
3 skaitmeninis kaištis (PWM) |
|
8 |
PE6 (t3/int6) |
|
|
9 |
PE7 (CLK0/ICP3/Int7) |
|
|
10 |
VCC |
VCC |
|
11 |
GND |
GND |
|
12 |
PH0 (RXD2) |
Skaitmeninis kaištis 17 (RX2) |
|
13 |
PH1 (TXD2) |
Skaitmeninis kaištis 16 (TX2) |
|
14 |
PH2 (xck2) |
|
|
15 |
PH3 (OC4A) |
Skaitmeninis smeigtukas 6 (PWM) |
|
16 |
PH4 (OC4B) |
Skaitmeninis kaištis 7 (PWM) |
|
17 |
PH5 (OC4C) |
8 skaitmeninis kaištis (PWM) |
|
18 |
PH6 (OC2B) |
Skaitmeninis kaištis 9 (PWM) |
|
19 |
PB0 (SS/PCInt0) |
Skaitmeninis smeigtukas 53 (SS) |
|
20 |
PB1 (SCK/PCInt1) |
Skaitmeninis smeigtukas 52 (SCK) |
|
21 |
PB2 (Mosi/PCInt2) |
Skaitmeninis smeigtukas 51 (Mosi) |
|
22 |
PB3 (MISO/PCInt3) |
Skaitmeninis kaištis 50 (MISO) |
|
23 |
PB4 (OC2A/PCInt4) |
Skaitmeninis kaištis 10 (PWM) |
|
24 |
PB5 (OC1A/PCInt5) |
Skaitmeninis kaištis 11 (PWM) |
|
25 |
PB6 (OC1B/PCInt6) |
Skaitmeninis kaištis 12 (PWM) |
|
26 |
PB7 (OC0A/OC1C/PCInt7) |
Skaitmeninis kaištis 13 (PWM) |
|
27 |
PH7 (T4) |
|
|
28 |
PG3 (TOSC2) |
|
|
29 |
PG4 (TOSC1) |
|
|
30 |
Atstatyti |
Atstatyti |
|
31 |
VCC |
VCC |
|
32 |
GND |
GND |
|
33 |
Xtal2 |
Xtal2 |
|
34 |
Xtal1 |
Xtal1 |
|
35 |
PL0 (ICP4) |
Skaitmeninis kaištis 49 |
|
36 |
PL1 (ICP5) |
Skaitmeninis kaištis 48 |
|
37 |
PL2 (T5) |
Skaitmeninis kaištis 47 |
|
38 |
PL3 (OC5A) |
Skaitmeninis kaištis 46 (PWM) |
|
39 |
PL4 (OC5B) |
Skaitmeninis kaištis 45 (PWM) |
|
40 |
PL5 (OC5C) |
Skaitmeninis kaištis 44 (PWM) |
|
41 |
PL6 |
Skaitmeninis kaištis 43 |
|
42 |
PL7 |
Skaitmeninis kaištis 42 |
|
43 |
PD0 (SCL/INT0) |
Skaitmeninis kaištis 21 (SCL) |
|
44 |
PD1 (SDA/INT1) |
Skaitmeninis kaištis 20 (SDA) |
|
45 |
PD2 (rxd1/int2) |
Skaitmeninis kaištis 19 (RX1) |
|
46 |
Pd3 (txd1/int3) |
Skaitmeninis kaištis 18 (TX1) |
|
47 |
PD4 (ICP1) |
|
|
48 |
PD5 (xck1) |
|
|
49 |
PD6 (T1) |
|
|
50 |
PD7 (T0) |
Skaitmeninis smeigtukas 38 |
|
51 |
PG0 (WR) |
Skaitmeninis PIN 41 |
|
52 |
PG1 (RD) |
Skaitmeninis kaištis 40 |
|
53 |
PC0 (A8) |
Skaitmeninis smeigtukas 37 |
|
54 |
PC1 (A9) |
Skaitmeninis smeigtukas 36 |
|
55 |
PC2 (A10) |
Skaitmeninis smeigtukas 35 |
|
56 |
PC3 (A11) |
Skaitmeninis kaištis 34 |
|
57 |
PC4 (A12)
|
Skaitmeninis smeigtukas 33 |
|
58 |
PC5 (A13) |
Skaitmeninis smeigtukas 32 |
|
59 |
PC6 (A14) |
Skaitmeninis kaištis 31 |
|
60 |
PC7 (A15) |
Skaitmeninis kaištis 30 |
|
61 |
VCC |
|
|
62 |
GND |
|
|
63 |
PJ0 (RXD3/PCInt9) |
Skaitmeninis kaištis 15 (RX3) |
|
64 |
PJ1 (TXD3/PCInt10) |
Skaitmeninis kaištis 14 (TX3) |
|
65 |
PJ2 (xck3/pcint11) |
|
|
66 |
PJ3 (PCInt12) |
|
|
67 |
PJ4 (PCInt13) |
|
|
68 |
PJ5 (PCInt14) |
|
|
69 |
PJ6 (PCInt15) |
|
|
70 |
Pg2 (ale) |
Skaitmeninis smeigtukas 39 |
|
71 |
PA7 (AD7) |
Skaitmeninis kaištis 29 |
|
72 |
PA6 (AD6) |
Skaitmeninis kaištis 28 |
|
73 |
PA5 (AD5) |
Skaitmeninis kaištis 27 |
|
74 |
PA4 (AD4) |
Skaitmeninis kaištis 26 |
|
75 |
PA3 (AD3) |
Skaitmeninis kaištis 25 |
|
76 |
PA2 (AD2) |
Skaitmeninis kaištis 24 |
|
77 |
PA1 (AD1) |
Skaitmeninis kaištis 23 |
|
78 |
PA0 (AD0) |
Skaitmeninis kaištis 22 |
|
79 |
PJ7 |
|
|
80 |
VCC |
VCC |
|
81 |
GND |
GND |
|
82 |
PK7 (ADC15/PCInt23) |
Analoginis kaištis 15 |
|
83 |
PK6 (ADC14/PCInt22) |
Analoginis kaištis 14 |
|
84 |
PK5 (ADC13/PCInt21) |
Analoginis kaištis 13 |
|
85 |
PK4 (ADC12/PCInt20) |
Analoginis kaištis 12 |
|
86 |
PK3 (ADC11/PCInt19) |
Analoginis kaištis 11 |
|
87 |
PK2 (ADC10/PCInt18) |
Analoginis kaištis 10 |
|
88 |
PK1 (ADC9/PCInt17) |
Analoginis kaištis 9 |
|
89 |
PK0 (ADC8/PCInt16) |
Analoginis kaištis 8 |
|
90 |
Pf7 (ADC7/TDI) |
Analoginis kaištis 7 |
|
91 |
Pf6 (ADC6/TMO) |
Analoginis kaištis 6 |
|
92 |
PF5 (ADC5/TMS) |
Analoginis kaištis 5 |
|
93 |
PF4 (ADC4/TCK) |
Analoginis kaištis 4 |
|
94 |
PF3 (ADC3) |
3 analoginis kaištis |
|
95 |
PF2 (ADC2) |
2 analoginis kaištis |
|
96 |
PF1 (ADC1) |
1 analoginis kaištis |
|
97 |
PF0 (ADC0) |
Analoginis kaištis 0 |
|
98 |
Aref |
Analoginė nuoroda |
|
99 |
GND |
GND |
|
100 |
AVCC |
VCC |
CAD modelis
Simbolis
Pėdsakas
3D vaizdas
Techninės specifikacijos
Čia yra techninių specifikacijų, atributų, parametrų ir panašių dalių kaip „Microchip Technology“ lentelė Atmega2560-16au.
|
Tipas |
Parametras |
|
Gamyklos švino laikas |
7 savaitės |
|
Kalno |
Paviršiaus laikiklis |
|
Montavimo tipas |
Paviršiaus laikiklis |
|
Paketas / atvejis |
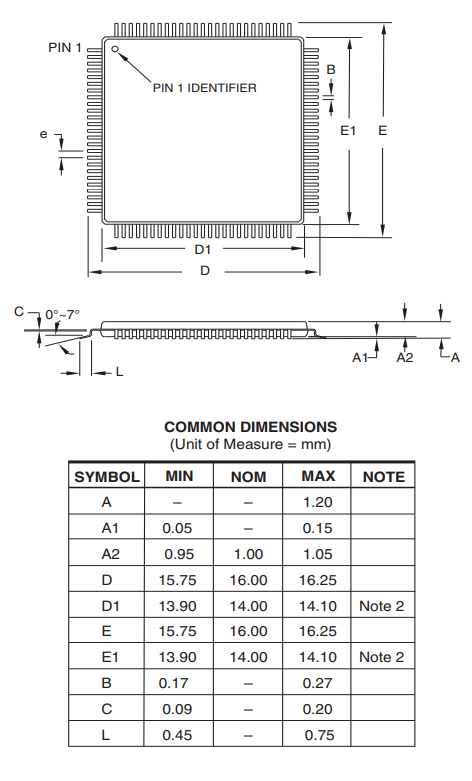
100-TQFP |
|
Smeigtukų skaičius |
100 |
|
Duomenų keitikliai |
A/D 16x10B |
|
I/OS skaičius |
86 |
|
Budėjimo laikmačiai |
Taip |
|
Darbinė temperatūra |
-40 ° C ~ 85 ° C TA |
|
Pakuotė |
Dėklas |
|
Serija |
AVR® Atmega |
|
Paskelbta |
2009 m |
|
JESD-609 kodas |
E3 |
|
PBFREE kodas |
Taip |
|
Dalies būsena |
Aktyvus |
|
Jautrumo drėgmės lygis (MSL) |
3 (168 valandos) |
|
Terminacijų skaičius |
100 |
|
Nutraukimas |
SMD/SMT |
|
Terminalo apdaila |
Matinė skarda (sn) - atkaitinė |
|
Papildoma funkcija |
Taip pat veikia esant mažiausiai 2,7 V, esant 8 MHz dažniui |
|
Terminalo padėtis |
Keturratis |
|
Terminalo forma |
Gulos sparnas |
|
Didžiausias reflovos temperatūra (° C) |
260 |
|
Tiekimo įtampa |
5v |
|
Terminalo žingsnis |
0,5 mm |
|
Dažnis |
16MHz |
|
Laikas@smailės reflow temperatūra (-os) |
40 |
|
Bazinės dalies numeris |
Atmega2560 |
|
Darbinė tiekimo įtampa |
5v |
|
Maitinimo šaltiniai |
5v |
|
Sąsaja |
2 laidai, EBI/EMI, I2C, SPI, UART, USART |
|
Atminties dydis |
256 kb |
|
Osciliatoriaus tipas |
Vidinis |
|
RAM dydis |
8K x 8 |
|
Įtampa - tiekimas (VCC/VDD) |
4,5 V ~ 5,5 V. |
|
UPS/UCS/Periferinio ICS tipas |
Mikrokontroleris, Risc |
|
Pagrindinis procesorius |
Avr |
|
Periferiniai įrenginiai |
„Brown-Out“ aptikimas/atstatymas, POR, PWM, WDT |
|
Programos atminties tipas |
Blykstė |
|
Šerdies dydis |
8 bitų |
|
Programos atminties dydis |
256kb 128k x 16 |
|
Jungiamumas |
EBI/EMI, I2C, SPI, UART/USART |
|
Bitų dydis |
8 |
|
Prieigos laikas |
16 μs |
|
Turi ADC |
Taip |
|
DMA kanalai |
Ne |
|
Duomenų magistralės plotis |
8b |
|
Laikmačių/skaitiklių skaičius |
6 |
|
Tankis |
2 MB |
|
Eeprom dydis |
4K x 8 |
|
ADC kanalų skaičius |
16 |
|
PWM kanalų skaičius |
12 |
|
I2C kanalų numeris |
1 |
|
Ūgis |
1,05 mm |
|
Ilgis |
14,1 mm |
|
Plotis |
14,1 mm |
|
Pasiekti SVHC |
Nėra SVHC |
|
Spinduliuotės kietėjimas |
Ne |
|
ROHS būsena |
ROHS3 suderinamas |
|
LENGVAS NEMOKAMAS |
LENGVAS NEMOKAMAS |
Savybės
|
Funkcijų kategorija |
Savybė |
|
Aukštos ištvermės nestabilios atminties segmentai |
Rašyti/ištrinti ciklus: 10 000 blykstės |
|
„Atmel QTouch“ bibliotekos palaikymas |
Taip |
|
JTAG sąsaja |
IEEE std.1149.1 suderinamas |
|
Periferinės savybės |
Realaus laiko skaitiklis su atskiru osciliatoriumi |
|
Programuojamas budėjimo laikmatis su atskiru lustu
Osciliatorius |
|
|
„On Chip“ analoginis palyginimas |
|
|
Pertraukti ir pabudę dėl PIN keitimo |
|
|
Kitos ypatingos savybės |
„Power-On“ atstatymas ir programuojamas aptikimas rudos spalvos |
|
Vidinis kalibruotas osciliatorius |
|
|
Išoriniai ir vidiniai pertraukimo šaltiniai |
|
|
Miego režimai |
Šeši režimai: tuščiosios eigos, ADC triukšmo mažinimas, energijos taurė,
„Power-Down“, budėjimo režimas, išplėstinis budėjimo režimas |
Paraiškos
„Atmega2560“ mikrovaldiklis, švenčiamas dėl savo išskirtinių veiklos galimybių, yra daugelio šiuolaikinių technologijų programų pagrindas.Plačią jo pritaikymą skatina jo pritaikomumas ir patikimumas daugelyje projektų, efektyviai išspręsti sudėtingus sistemos poreikius.
3D spausdinimo naujovės
3D spausdinimo pramonėje ATMEGA2560 vaidina pagrindinį vaidmenį valdant spausdintuvų judesį ir užtikrinant kruopštų kiekvieno sluoksnio išdėstymą.Jo sudėtinga apdorojimo galia tvarko sudėtingus algoritmus, užtikrinančius aukštos kokybės rezultatus.Tiksliai koordinuodama variklio veiksmus ir siūlo siūlų išdavimą, jis žymiai padidina spausdinimo skiriamąją gebą ir tikslumą.Dažnai galite išnaudoti didelius mikrovaldiklio I/O kaiščius, kad sujungtumėte jutiklių ir variklio tvarkyklių rinkinį, įgalindami išsamius judesius.Patirtis rodo, kad pritaikytos programinės įrangos optimizavimas konkrečiems 3D spausdintuvams gali padidinti spausdinimo kokybę ir sumažinti gamybos laiką, pabrėždamas lanksčią mikrovaldiklio pobūdį.
Variklio valdymas
„Atmega2560“ randa plačiai pritaikytą variklio valdymo sistemose, palengvindamas sudėtingų valdymo algoritmų vykdymą patikimam variklio veikimui.Tai užtikrina efektyvų greičio reguliavimą ir krypčių valdymą, o tai ypač naudinga robotų ir pramoninėms sistemoms, reikalaujančioms tikslaus veikimo tikslumo.Praktikoje grįžtamojo ryšio jutiklių integravimas į ATMEGA2560 padidina našumą nuolat atnaujinant veiklos parametrus.Dažnai galite pabrėžti pakartotinio bandymo ir kalibravimo vertę, kad pasiektumėte aukštesnį variklio valdymą, todėl padidėja produktyvumas ir sistemos patikimumas.
Jutiklio sąsaja
Jutiklio sąsajai mikrovaldiklis sudaro pagrindą integruoti įvairius analoginius ir skaitmeninius jutiklius, apdorojant jų duomenis, kad būtų galima pateikti veiksmus.Ši galimybė yra aktyvi sistemose, kuriose yra didžiausias rinkimo ir stebėjimo aplinkosaugos duomenys, pavyzdžiui, orų stotyse ir išmaniuose miestuose.Galite pabrėžti duomenų gavimo metodų patobulinimo pranašumus ir signalo apdorojimo algoritmus, kad padidintumėte jutiklių rodmenų patikimumą.Šie patobulintos metodai prisideda prie kompetentingesnių ir reaguojančių stebėjimo sistemų kūrimo.
Išsamus temperatūros aptikimas
Temperatūros aptikimo sistemose ATMEGA2560 išsiskiria vienu metu valdant daugybę jutiklių įėjimų, palaikydamas išsamų faktinį šiluminį stebėjimą.Tvirtas jo apdorojimo gebėjimas garantuoja tikslius temperatūros rodmenis, naudojamus pritaikymui klimato kontrolės ir saugos sistemose.Norint įgyvendinti nereikalingus jutimo kelius, dažnai patariama padidinti sistemos patikimumą - tai praktika, dažniausiai naudinga aplinkoje, kurioje naudojamas temperatūros stabilumas.Tai iliustruoja pusiausvyrą tarp novatoriškos inžinerijos ir praktinio patikimumo.
„Smart Home“ ir „IoT“ diegimai
Namų automatizavimo ir IoT sistemų srityje „ATMEGA2560“ įgalina pažangias funkcijas, pradedant nuo žibintų ir prietaisų reguliavimo ir baigiant sudėtingais namų saugumo sprendimais.Jo ryšio funkcijos užtikrina sklandų integraciją į asortimento ryšio protokolus, skatinant darnią ekosistemą.Norėdami pasiekti optimalų našumo ir patikimumo balansą ir patikimumo balansą, galite pasisakyti tyrinėti hibridines sistemas, kurios naudoja ir laidines, ir belaidžius technologijas.Ši integracija dažnai sukelia puikią patirtį ir protingesnes gyvenamosios vietos.
Alternatyvos
• Atmega88
Schema
Paketas
Gamintojas
„Microchip Technology Inc.“, esančioje gyvybingoje Chandler, Arizonos mieste, vietose, yra pasauliniu mastu pripažintas pažangiausių mikrovaldiklių sprendimų kūrėjas.Bendrovės nenutrūkstamas naujovių ir patikimumo siekimas pavertė ją pastebima vieta konkurencinės elektronikos pramonėje.
Mikrokontroleriai, kuriuos iliustruoja „Microchip“ ATMEGA2560, yra pagrindiniai veikiant daugybei elektroninių prietaisų.Darbas daugelyje prietaisų, jų naudojimas nuo pagrindinės vartojimo elektronikos iki sudėtingų pramonės sistemų.Šis pritaikomumas yra jų poveikio liudijimas, nes jie vaidina svarbų vaidmenį formuojant įrenginio efektyvumą, našumą ir energijos suvartojimą.
Duomenų lapas PDF
ATMEGA2560-16AU duomenų lapai:
Apie mus
ALLELCO LIMITED
Skaityti daugiau
Greitas užklausa
Prašau atsiųsti užklausą, mes nedelsdami atsakysime.
Dažnai užduodami klausimai [FAQ]
1. Ar „Arduino“ naudoja ATMEGA2560?
„Arduino Mega 2560“, maitinamas „ATMEGA2560“ mikrovaldikliu, išsiskiria dėl savo sugebėjimo valdyti sudėtingas operacijas, kurias daugiausia palengvina jos gausu I/O kaiščiai ir eskizinė eskizo atmintis.Šie požymiai suteikia didelę naudą tokioms pastangoms kaip 3D spausdinimas ir rafinuota robotika.Galite rasti jo pritaikomumą naudingumą išplečiant projekto galimybes.Daugelis pabrėžia, kaip platus kaiščiai ir apdorojimo pajėgumas leidžia tuo pačiu metu koordinuoti duomenų koordinavimą ir periferinę integraciją, o tai padidina sudėtingų projektų sudėtingumą ir pasiekiamumą.
2. Ar yra „Atmega2560“ panardinimo versija?
„ATMEGA2560“ panardinimo paketo versija neegzistuoja, o ATMEGA1284 yra artimiausias atminties talpos pakaitalas.Tačiau jis netrūksta I/O smeigtukų ir serijinių uostų, todėl reikia atsižvelgti į kompromisus tarp dydžio ir operacinio pločio.Naršydami šį reljefą, galite pasirinkti „Surface Mount“ technologiją, kad patenkintumėte didelius I/O reikalavimus, nepaisant jo papildytų surinkimo ir remonto iššūkių.
3. Kaip sudeginti įkrovos krautuvą į „Arduino Atmega2560“?
Norint nustatyti įkrovos krautuvą „ATMEGA2560“, reikia specifinių įrankių, tokių kaip „usbyISP“, ir aiški procedūra, prieinama per „Arduino IDE“.Įvaldyti šią techniką yra naudinga norint išlaisvinti visas mikrovaldiklio galimybes, leidžiančias suasmenintiems programinės įrangos diegimams ir smailės našumui.Dažnai galite pastebėti, kad patikimas įkrovos apkrovos diegimo metodas žymiai sustiprina vystymosi nuoseklumą ir projekto triumfą.
4. Koks yra geriausias „Atmega2560“ programuotojas?
„Atmel-Ice“ išsiskiria kaip pageidaujamas įrankis programavimo ir derinimo „ATMEGA2560“ mikrovaldikliams, giriamoms už didelį suderinamumą su „ARM® Cortex®-M“ ir AVR įrenginiais.Jos stiprybė yra gebėjimas efektyviai spręsti įvairias derinimo užduotis, taip palengvinant plėtros darbo eigą.Jūs žinote, kad turintys aukšto lygio programuotoją, pavyzdžiui, „Atmel-Ice“, gali padidinti derinimo efektyvumą, teigiamą įtaką projekto tvarkaraščiams.

TMC2208 ir TMC2209: Kuris „Stepper“ tvarkyklė jums tinka?
2024/11/13

HC-06 „Bluetooth“ modulis: programos, „Arduino“ ryšys ir specifikacijos
2024/11/12
Populiarūs įrašai
-
Kas yra GND grandinėje?
1970/01/1 3170
-

RJ-45 jungties vadovas: RJ-45 jungties spalvų kodai, laidų schemos, R-J45 programos, RJ-45 duomenų lapai
1970/01/1 2747
-
Suprasti maitinimo įtampą elektronikoje VCC, VDD, VEE, VSS ir GND
0400/11/17 2399
-

Pluošto jungčių tipai: SC vs LC ir LC VS MTP
1970/01/1 2216
-

Palyginimas tarp DB9 ir Rs232
1970/01/1 1835
-

Kas yra LR44 baterija?
Elektra, ši visur esanti jėga, tyliai persmelkia kiekvieną mūsų kasdienio gyvenimo aspektą, pradedant nuo nereikšmingų įtaisų iki gyvybei pavojingos medicinos įrangos, ji vaidina tylų vaidmenį.Tačiau tikrai suvokti šią energiją, ypač tai, kaip ją laikyti ir efektyviai išvesti, nėra lengva užduotis.Šiame straipsnyje pagrindinis dėmesys bus skiriamas monetų elementų baterij...1970/01/1 1807
-
Supratimas apie pagrindus: atsparumas induktyvumui, ir operatyvumas
Sudėtingame elektros inžinerijos šokyje pagrindinių elementų trijulė užima svarbiausią vietą: induktyvumas, pasipriešinimas ir talpa.Kiekvienas turi unikalius bruožus, kurie diktuoja dinaminius elektroninių grandinių ritmus.Čia mes pradedame kelionę iššifruoti šių komponentų sudėtingumą, atskleisti jų skirtingus vaidmenis ir praktinius naudojimo būdus didžiuliame elektrini...1970/01/1 1763
-

„CR2430“ akumuliatoriaus išsamus vadovas: specifikacijos, programos ir palyginimas su CR2032 baterijomis
Kas yra CR2430 akumuliatorius?CR2430 baterijų pranašumaiNormaCR2430 akumuliatoriaus pritaikymasCR2430 ekvivalentasCR2430 VS CR2032Baterija CR2430 dydisKo ieškoti perkant CR2430 ir ekvivalentusDuomenų lapas PDFDažnai užduodami klausimai Baterijos yra mažų elektroninių prietaisų širdis.Tarp daugelio turimų tipų monetų ląstelės vaidina lemiamą vaidmenį, dažniausiai randamą skaiči...1970/01/1 1730
-
Kas yra RF ir kodėl mes jį naudojame?
Radijo dažnio (RF) technologija yra pagrindinė šiuolaikinio belaidžio ryšio dalis, leidžianti perduoti duomenis dideliais atstumais be fizinių jungčių.Šis straipsnis gilinasi į RF pagrindus, paaiškindamas, kaip elektromagnetinė radiacija (EMR) leidžia RF ryšiui.Mes ištirsime EMR principus, RF signalų kūrimą ir valdymą bei jų plačią naudojimą.Straipsnyje taip pat aprašomi i...1970/01/1 1722
-
Išsamus HFE vadovas tranzistoriuose
Transistoriai yra esminiai modernių elektroninių prietaisų komponentai, įgalinantys signalo amplifikaciją ir valdymą.Šis straipsnis remiasi žiniomis, susijusiomis su HFE, įskaitant tai, kaip pasirinkti tranzistoriaus HFE vertę, kaip rasti HFE ir įvairių tipų tranzistorių padidėjimą.Tyrinėdami HFE, mes įgyjame gilesnį supratimą apie tai, kaip tranzistoriai veikia ir jų vaidmuo ...5600/11/17 1698
Karštos dalies numeris
-

PAM8603ANHR
Diodes Incorporated
IC AMP CLASS D STEREO 3W 24SSOP
AZ23C6V8
Taiwan Semiconductor Corporation
SOT-23, 300MW, 5%, SMALL SIGNAL
FM1608B-SGTR
Ramtron
FRAM MEMORY, 8KX8 PDSO28
TSH340ILT
STMicroelectronics
IC AMP BUFFER SOT23-5
PIC12C671-04/P
Microchip Technology
IC MCU 8BIT 1.75KB OTP 8DIP
BD241BTU
onsemi
TRANS NPN 80V 3A TO220-3
MP8716EN-LF-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJUSTABLE 3A 8SOIC
CP0603A1900MNTR
KYOCERA AVX
RF DIR COUPLER 1.9GHZ 0603
500X14N101MV4T
Johanson Dielectrics, Inc.
CAP CER 100PF 50V C0G/NP0 0603
ADAS3023BCPZ
Analog Devices Inc.
IC ADC 16BIT SAR 40LFCSP
MAX6366PKA29+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL SOT23-8
PC3SD12NTZAH
SHARP/Socle Technology
OPTOISOLATOR 5KV TRIAC DIP
IRL8114PBF
International Rectifier
MOSFET N-CH 30V 90A TO220AB
BZX84-C75,215
Nexperia USA Inc.
DIODE ZENER 75V 250MW TO236AB
ADV7390BCBZ-A-RL
Analog Devices Inc.
IC VIDEO ENCODER 10BIT 30WLCSP
STW15NM60N
STMicroelectronics
MOSFET N-CH 600V 14A TO247-3
ADM3050EBRIZ
Analog Devices Inc.
IC TXRX/ISO 1/1 8SOIC
SN74HC245PW
Texas Instruments
IC TXRX NON-INVERT 6V 20TSSOP -
RFP50N06
Harris Corporation
MOSFET N-CH 60V 50A TO220-3
TLV9054IPWR
Texas Instruments
IC CMOS 1 CIRCUIT 14TSSOP
LP3966ET-ADJ
Texas Instruments
IC REG LINEAR POS ADJ 3A TO220-5
VI-24Z-CW
Vicor Corporation
DC DC CONVERTER 2V 20W
SI1058X-T1-GE3
Vishay Siliconix
MOSFET N-CH 20V SC89-6
N25Q256A13EF840E
Micron Technology Inc.
IC FLASH 256MBIT SPI 8VDFPN
12063D105MAT2A
KYOCERA AVX
CAP CER 1UF 25V X5R 1206
FW300H1
ABB Power Electronics Inc.
DC DC CONVERTER 24V 300W
LTC1279CSW#PBF
Analog Devices Inc.
IC ADC 12BIT SAR 24SOIC
AT25160BN-SH-T
Microchip Technology
IC EEPROM 16KBIT SPI 20MHZ 8SOIC
LM2596SX-ADJ
Texas Instruments
IC REG BUCK ADJ 3A TO263-5
ACH4518-681-TD01
TDK Corporation
FILTER LC(T) SMD
BZX84C3V3-7
Diodes Incorporated
DIODE ZENER 3.3V 300MW SOT23-3
LC51024MV-75FN484C
Lattice Semiconductor Corporation
IC CPLD 1024MC 7.5NS 484FPBGA
PEB2096HV2.1
Infineon Technologies
OCTAT-P OCTAL TRANSCEICER
RT9302GJ8
Richtek USA Inc.
IC LED DRV LIN PWM 20MA TSOT23-8
LQS60A48-3V3EJ
Artesyn Embedded Power
DC DC CONVERTER 3.3V 200W
170262-2
TE Connectivity AMP Connectors
CONN SOCKET 20-26AWG CRIMP TIN -
0805YA472KAT2A
KYOCERA AVX
CAP CER 4700PF 16V NP0 0805
18087C331KAT2A
KYOCERA AVX
CAP CER 330PF 500V X7R 1808
245804040000829+
KYOCERA AVX
RECPT - 0.4MM PITCH - 40 POS - 0
TSB82AA2BIPGE
Texas Instruments
IC CONTROLLER OHCI-LYNX 144LQFP
LTC2058HS8E#PBF
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 2 CIRC 8SOIC
BAV70LT3G
onsemi
DIODE ARRAY GP 100V 200MA SOT23
P4SMA120A
Meritek
TVS DIODE 102VWM 165VC
NFM21CC221R1H3D
Murata Electronics
CAP FEEDTHRU 220PF 20% 50V 0805
IPP50R380CE
Infineon Technologies
POWER FIELD-EFFECT TRANSISTOR, 5
C1005X5R1H153M050BB
TDK Corporation
CAP CER 0.015UF 50V X5R 0402
LFX125EB-04F256C
Lattice Semiconductor Corporation
IC FPGA 160 I/O 256FBGA
P2010NXN2HFC
NXP USA Inc.
IC MPU Q OR IQ 1.2GHZ 689TEBGA
SN74AS153N
Texas Instruments
IC MULTIPLEXER 2 X 4:1 16DIP
CL21CR82BBANNNC
Samsung Electro-Mechanics
CAP CER 0.82PF 50V C0G/NP0 0805
TXS0108EQPWRQ1
Texas Instruments
IC TRANSLATOR BIDIR 20TSSOP
ISL6613BCRZ
Intersil
HALF BRIDGE BASED MOSFET DRIVER,
SR205C104KAR
AVX Corporation
CAP CER 0.1UF 50V X7R RADIAL
AS4C32M16D2-25BCN
Alliance Memory, Inc.
IC DRAM 512MBIT PAR 84TFBGA