L298N variklio tvarkyklės: funkcijos, grandinės diagramos ir programos
Katalogas
Įvadas į L298N
L298N yra vertikali L298 paketo versija.Tai yra dviejų kanalų viso tilto variklio vairuotojo lustas, galintis priimti aukštą įtampą ir didelę srovę.Jo darbinė įtampa gali pasiekti 46 V, o maksimali išėjimo srovė yra 4A.Be to, L298N taip pat turi du įgalinimo valdymo terminalus.Šie valdymo gnybtai leidžia dinamiškai sureguliuoti grandinės darbo režimą prijungus ir atjungiant įvežimo megztinį, nesikreipiant į įvesties signalą.„L298N“ įrengtas loginis galios įvestis, leidžianti vidinės loginės grandinės dalies veikimui esant žemai įtampai.Tuo pačiu metu jis taip pat gali išvesti 5 V loginę įtampą išoriškai.Norint išvengti įtampos stabilizuojančios lusto pažeidimo, naudojant didesnę nei 12 V važiavimo įtampą, labai rekomenduojama naudoti išorinę 5 V sąsają nepriklausomam maitinimo šaltiniui.
L298N valdo pagrindinio valdymo lusto įvesties/išvesties įvesties gnybtą ir sureguliuoja išėjimo įtampą tiesiai per maitinimo šaltinį, kad variklio priekinė dalis, atvirkštinė ir stotelė būtų nukreipta.Paprastai L298N gali tiesiogiai vairuoti reles (keturias puses), solenoidus, solenoidinius vožtuvus, du nuolatinės srovės variklius ir vieną žingsninio variklį (dviejų fazių arba keturių fazių).
Alternatyvos ir ekvivalentai:
• E-L298N
• L298hn
• LM18298T
L298N funkcinės savybės
Loginis įvesties suderinamumas: L298N loginis įvestis yra suderinamas su TTL, CMOS ir kitais logikos lygiais.
Apsauga nuo perkaitimo: L298N turi perkaitimo apsaugos funkciją.Kai lusto temperatūra yra per aukšta, ji automatiškai atjungs išvestį.
Integruotas nemokamas poliškumo diodas: L298N turi įmontuotą nemokamą poliškumo diodą, kuris gali būti naudojamas DC varikliams stabdyti.
Didelė srovė: L298N gali suteikti didelę išėjimo srovę ir tinkama kai kurioms programoms, kurioms reikalinga didelė vairavimo srovė.
Dviguba H tilto struktūra: L298N integruoja dvigubą H tilto struktūrą, kuri gali valdyti dviejų nuolatinės srovės variklių ar žingsnių variklių vairavimą ir greitį.
L298N grandinės diagrama
L298N grandinės schema yra tokia:
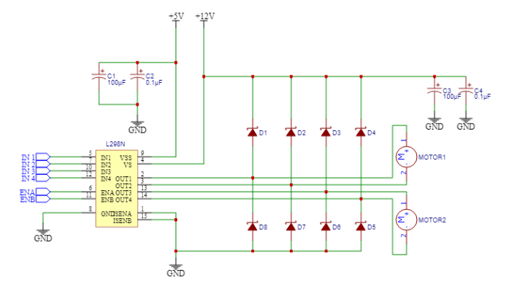
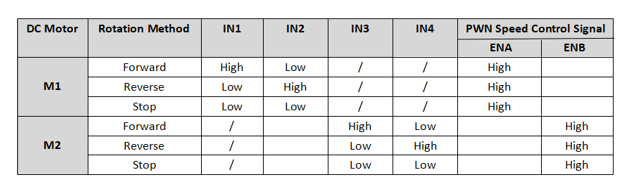
OUT1, OUT2 ir OUT3, OUT4 yra prijungtos prie „Motor1“, „Motor2“;IN1, IN2, IN3, IN4 PINS iš Mikrokontrolerio, kad pasiektumėte valdymo lygį, kad būtų galima valdyti variklį į priekį ir atbuline eiga;ENA, ENB, prijungtas prie įgalinimo terminalo valdymo, valdyti variklio greitį.L298N valdymo logikos santykių schema yra tokia:
Kalbant apie variklio greičio reguliavimą, mes pasirinkome PWM greičio reguliavimo metodą.Principas yra greičio reguliavimo realizavimas, kontroliuojant perjungimo vamzdžio laidumo laiką T viename cikle.Vidutinė Variklio įtampa U per visą ciklą t gali būti išreikšta kaip u = vcc × (t/t) = a × vcc.Kur, a = t/t, yra žinomas kaip darbo ciklas, o VCC žymi tiekimo įtampą.Variklio greitis yra proporcingas variklio įtampai, o variklio įtampa yra proporcinga valdymo bangos formos darbo ciklui.Todėl tarp variklio greičio ir darbo ciklo yra proporcingas ryšys: kuo didesnis darbo ciklas, tuo greitesnis variklio greitis.
L298N kontrolės metodas
Naudodamiesi L298N, turime įvesti valdymo signalus į 1, IN2, IN3 ir IN4, kad būtų galima valdyti variklio priekinę ir atvirkštinę sukimąsi ir greitį.Čia yra keli kontrolės metodai:
PWM valdymo režimas
PWM režimas gali efektyviai valdyti variklio greitį.Naudodami PWM režimą, turime naudoti du kaiščius EN1 ir EN2, kad būtų galima sureguliuoti variklio greitį.Tiksliau, kai EN1 ir EN2 kaiščiai yra aukšto lygio, variklis veiks normaliai;Kai jie bus žemo lygio, variklis nustos sukasi.
Vienos pusės valdymo režimas
Kai IN1, IN2, IN3 ir IN4 tuo pačiu metu yra aukštas, variklis sukasi į priekį;Kai bet kurie du įvesties prievadai yra aukšto lygio, o kiti du įvesties prievadai yra žemi, variklis sukasi atvirkščiai.
Dvikrypčio valdymo režimas
Naudojant dvikrypčio valdymo režimą, IN1 ir IN2 yra atsakingi už 1 variklio valdymą, o IN3 ir IN4 yra atsakingi už 2 variklio valdymą. Konkrečiai, kai IN1 yra aukštas, o IN2 yra žemas, 1 variklis pasisuks į priekį;Ir atvirkščiai, kai IN1 yra žemas, o IN2 yra aukštas, 1 variklis sukasi atvirkščiai.Lygiai taip pat „IN3“ ir „IN4“ valdymo logika taip pat taikoma variklio 2 pasukimo ir atvirkštinės sukimosi valdymui.
PIN diagrama ir L298N funkcijos
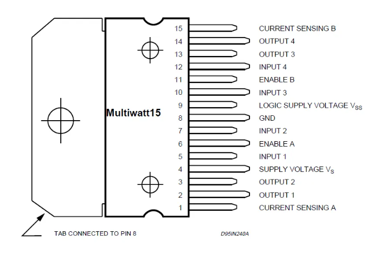
Galios kaištis
VS: Tiekimo įtampos įvestis (iki 46 V)
GND: žemės smeigtukas
Loginio valdymo kaištis
IN1, IN2: naudojamas variklio 1 sukimosi krypčiai valdyti
IN3, IN4: Naudojamas variklio 2 sukimosi krypčiai valdyti
Variklio valdymo kaištis:
Out1, Out2: naudojamas variklio 1 krypčiai valdyti
Out3, out4: naudojamas 2 variklio krypčiai valdyti
ENA: Įgalinkite PIN, naudojamas valdyti variklio greitį 1
ENB: Įgalinkite PIN, naudojamas valdyti variklio 2 greitį
Kaip naudoti L298N?
Prijunkite maitinimo šaltinį: L298N tvarkyklės modulio maitinimo šaltinis turėtų būti laikomas nuo 12 V iki 35 V.Praktinėms reikmėms, siekiant užtikrinti maitinimo šaltinio stabilumą, mums taip pat gali tekti filtruoti maitinimo šaltinį.
Prijunkite variklius: Mes prijungiame du variklius prie L298N išvesties kaiščių per tvarkyklę, o valdymo lygis tiesiogiai įvedamas prie variklio per L298N.
Valdymo L298N: Mes naudojame valdymo prievadą (įjunkite, valdymo kaiščią), kad valdytume L298N.Priskirdami vertes, turime nustatyti įjungimo prievado ir valdymo kaiščio būseną.Šios būsenos nustatys L298N išvesties lygio būseną.Keisdami šias būsenas, galime veiksmingai valdyti variklio priekinę ir atvirkštinę sukimąsi ir greitį.
Kaip naudoti PWM variklio greičiui reguliuoti?
Jei norime naudoti PWM variklio greičiui reguliuoti, turime du laidų metodus:
Vienas laidų metodas (rekomenduojamas):
Mes pašaliname megztinio dangtelį tarp kanalo įjungimo ir 5 V, prijunkite įjungimo kaištį prie „Arduino“ PWM kaiščio ir prijunkite 1 ir 2 kaiščius prie dviejų įprastų Arduino kaiščių.Tokiu būdu galime valdyti kanalo jungiklį per PWM kaiščią, kad sureguliuotume variklio greitį;Kontroliuodami 1 ir 2 kaiščių lygio būklę, galime valdyti variklio sukimosi kryptį.Tokiam laidų būdu reikia naudoti tik vieną PWM kaiščią kiekviename kanale, tačiau jis užima du įprastus kaiščius.Todėl praktiniuose pritaikymuose turime pasverti ir pasirinkti iš kelių laidų metodų, atsižvelgiant į „Arduino“ galimų kaiščių skaičių.
Antrasis laidų metodas (nerekomenduojamas):
Mes nepašaliname megztinio tarp kanalo įjungimo ir 5 V, todėl kanalas išliks nuolat atidarytas.Tada mes sujungėme 1 ir 2 kaiščius atitinkamai prie dviejų Arduino PWM sąsajų.Valdydami atitinkamai iš išėjimus, atitinkančius šiuos du kaiščius, galime valdyti variklio sukimosi kryptį ir greitį.Akivaizdu, kad šis laidų metodas užims daugiau PWM kaiščių, nes kiekvienam kanalui reikia dviejų PWM kaiščių, kad būtų galima valdyti.Tačiau šis metodas neužima jokių įprastų kaiščių.Todėl mes nerekomenduojame naudoti šios laidų schemos, kai PWM PIN ištekliai yra įtempti.
Kur naudojamas L298N?
Elektrinės transporto priemonės: L298N gali būti naudojamas valdyti pavaros variklius elektrinėse transporto priemonėse, tokiose kaip elektriniai dviračiai, motoroleriai ir kt., Pavyzdžiui, dviračiuose, tiksliai kontroliuojant variklio sukimosi greitį ir kryptį, L298N gali pasiekti pagreitį, skaldymą ir nuslėpimą.Stabilus elektrinių dviračių vairavimas.Motociklininkas gali perduoti instrukcijas L298N, valdydamas rankeną ar mygtukus, taip kontroliuodamas variklio išvestį, kad dviračio pavara būtų pavesta pagal motociklininko norus.
Automatizuota pramoninė įranga: Pramonės automatizavimo srityje L298N gali būti naudojamas valdyti įvairios pramoninės įrangos variklius, tokius kaip konvejerio diržai, robotiniai ginklai, pramoniniai robotai ir kt., Pavyzdžiui, robotų rankoje, L298N tiksliai kontroliuojaVariklio sukimosi kampas ir greitis, leidžiantis robotinei rankai judėti pagal iš anksto nustatytą trajektoriją ir pasiekti aukšto tikslumo veikimą.Tai ne tik pagerina gamybos efektyvumą, bet ir sumažina gamybos nuostolius, kuriuos sukelia veiklos klaidos.
Robotų technologija: L298N dažnai naudojamas robotų projektuose, siekiant valdyti pavaros variklį, kad būtų galima įgyvendinti roboto judėjimą ir veikimą.Pramoniniams robotams dažnai reikia atlikti sunkiųjų krūvių, didelio tikslumo darbus, ir turėti ypač didelius pavaros variklių reikalavimus.„L298N“ teikia galingą energijos palaikymą pramoniniams robotams, turinčius puikias vairavimo galimybes ir stabilumą.Nesvarbu, ar tai tvarkymas, surinkimas ar patikrinimas, L298N gali užtikrinti, kad pramoniniai robotai tiksliai ir efektyviai atliktų užduotis.
Išmanieji namai: „Smart Home Systems“ L298N gali būti naudojamas kontroliuoti žaliuzių, užuolaidų, durų ir kitos įrangos variklius, kad būtų galima automatiškai valdyti.Derinant su jutikliais, namų įrangą galima automatiškai sureguliuoti atsižvelgiant į apšvietimą, temperatūrą ir kitas sąlygas.
Saulės sekimo sistema: Saulės sistemose L298N gali būti naudojamas saulės baterijų pakreipimo kampui valdyti, kad būtų galima įdiegti saulės sekimo sistemą.Valdydama L298N, saulės sekimo sistema gali pajusti saulės padėties pokyčius realiu laiku ir atitinkamai sureguliuoti saulės baterijų pakreipimo kampą.Šis dinaminio reguliavimo procesas užtikrina, kad saulės baterijos visada palaiko optimalų saulės kampą ir taip pagerins saulės baterijų energijos surinkimo efektyvumą.
Dažnai užduodami klausimai [DUK]
1. Ar L298N valdymo greitis gali?
„L298N“ yra dviguba „H-tilto“ variklio tvarkyklė, leidžianti greitis ir kryptis valdyti du DC variklius tuo pačiu metu.
2. Kodėl mano L298N neveikia?
Teisingai veikiant L298, jis turi būti didesnis nei 4,5 V.2. Visoje L298 prarasite galbūt 2,5 V.Gal liko pakankamai įtampos, kad būtų galima naudoti variklį.
3. Kas yra L298N?
„L298N“ variklio tvarkyklė yra valdiklis, kuris naudoja H-tiltą, kad lengvai valdytų variklių kryptį ir PWM greičiui valdyti.Šis modulis leidžia savarankiškai valdyti du variklius iki 2a iki 2a kiekvieno į abi puses.Tiekimo diapazonas gali skirtis nuo 5 V iki 35 V, to pakanka daugumai nuolatinės srovės variklių projektų.
4. Ar galime prijungti 4 variklius prie L298N?
Atsakymas yra „taip“ ir Nr. Tai priklauso nuo to, kaip jūs naudojate L298N variklio tvarkyklę.Iš pradžių L298N buvo sukurtas valdyti du nuolatinės srovės variklius arba vieną žingsninį variklį.Bet jei nenorite, kad kiekvienas variklis sukasi atgal, galite naudoti kiekvieną L298N tvarkyklės pusę, kad galėtumėte valdyti du nuolatinės srovės variklius, ir iš viso 4 variklius.
Apie mus
ALLELCO LIMITED
Skaityti daugiau
Greitas užklausa
Prašau atsiųsti užklausą, mes nedelsdami atsakysime.

„STWD100NYWY3F“ specifikacijos ir veikimo charakteristikos, taikymo pavyzdžiai mikroprocesorių sistemose
2024/08/29

IR2104 Išsamus vadovas: aukšto našumo pusės tilto tvarkyklės
2024/08/29
Populiarūs įrašai
-
Kas yra GND grandinėje?
1970/01/1 2956
-

RJ-45 jungties vadovas: RJ-45 jungties spalvų kodai, laidų schemos, R-J45 programos, RJ-45 duomenų lapai
1970/01/1 2511
-

Pluošto jungčių tipai: SC vs LC ir LC VS MTP
1970/01/1 2099
-
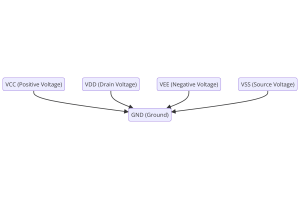
Suprasti maitinimo įtampą elektronikoje VCC, VDD, VEE, VSS ir GND
0400/11/10 1912
-

Palyginimas tarp DB9 ir Rs232
1970/01/1 1768
-

Kas yra LR44 baterija?
Elektra, ši visur esanti jėga, tyliai persmelkia kiekvieną mūsų kasdienio gyvenimo aspektą, pradedant nuo nereikšmingų įtaisų iki gyvybei pavojingos medicinos įrangos, ji vaidina tylų vaidmenį.Tačiau tikrai suvokti šią energiją, ypač tai, kaip ją laikyti ir efektyviai išvesti, nėra lengva užduotis.Šiame straipsnyje pagrindinis dėmesys bus skiriamas monetų elementų baterij...1970/01/1 1717
-
Supratimas apie pagrindus: atsparumas induktyvumui, ir operatyvumas
Sudėtingame elektros inžinerijos šokyje pagrindinių elementų trijulė užima svarbiausią vietą: induktyvumas, pasipriešinimas ir talpa.Kiekvienas turi unikalius bruožus, kurie diktuoja dinaminius elektroninių grandinių ritmus.Čia mes pradedame kelionę iššifruoti šių komponentų sudėtingumą, atskleisti jų skirtingus vaidmenis ir praktinius naudojimo būdus didžiuliame elektrini...1970/01/1 1666
-

„CR2430“ akumuliatoriaus išsamus vadovas: specifikacijos, programos ir palyginimas su CR2032 baterijomis
Kas yra CR2430 akumuliatorius?CR2430 baterijų pranašumaiNormaCR2430 akumuliatoriaus pritaikymasCR2430 ekvivalentasCR2430 VS CR2032Baterija CR2430 dydisKo ieškoti perkant CR2430 ir ekvivalentusDuomenų lapas PDFDažnai užduodami klausimai Baterijos yra mažų elektroninių prietaisų širdis.Tarp daugelio turimų tipų monetų ląstelės vaidina lemiamą vaidmenį, dažniausiai randamą skaiči...1970/01/1 1578
-
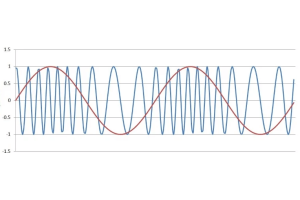
Kas yra RF ir kodėl mes jį naudojame?
Radijo dažnio (RF) technologija yra pagrindinė šiuolaikinio belaidžio ryšio dalis, leidžianti perduoti duomenis dideliais atstumais be fizinių jungčių.Šis straipsnis gilinasi į RF pagrindus, paaiškindamas, kaip elektromagnetinė radiacija (EMR) leidžia RF ryšiui.Mes ištirsime EMR principus, RF signalų kūrimą ir valdymą bei jų plačią naudojimą.Straipsnyje taip pat aprašomi i...1970/01/1 1553
-

CR2450 VS CR2032: Ar vietoj to galima naudoti akumuliatorių?
Ličio mangano baterijos turi tam tikrų panašumų su kitomis ličio baterijomis.Didelis energijos tankis ir ilgas tarnavimo laikas yra bendros savybės.Dėl tokios baterijos laimėjo daugelio vartotojų pasitikėjimą ir palankumą dėl savo unikalios saugos.Brangios technologijos įtaisai?Maži prietaisai mūsų namuose?Apsidairykite ir pamatysite juos visur.Tarp šių daugelio ličio-Manganese...1970/01/1 1520
Karštos dalies numeris
-
5M160ZM68C5N
Intel
IC CPLD 128MC 7.5NS 68MBGA
P9028-0NBGI
Renesas Electronics America Inc
IC WIRELESS PWR RECEIVER
AMC1311DWV
Texas Instruments
IC ISOLATION 8SOIC
STFI10NK60Z
STMicroelectronics
MOSFET N-CH 600V 10A I2PAKFP
BAS21DWA-7
Diodes Incorporated
DIODE SW DL 2500V 100MA SOT353
EP4SE360F35I4N
Intel
IC FPGA 744 I/O 1152FBGA
AOZ1038PI
Alpha & Omega Semiconductor Inc.
IC REG BUCK ADJUSTABLE 6A 8SO
FH42-19S-0.3SHW(99)
Hirose Electric Co Ltd
CONN FPC TOP 19POS 0.3MM R/A
254417
TE Connectivity Erni
40-PIN, VERTICAL, SMT
C2012X8R2A223K125AE
TDK Corporation
CAP CER 0.022UF 100V X8R 0805
MMBZ5221B-7
Diodes Incorporated
DIODE ZENER 2.4V 350MW SOT23-3
LM2901VQPWRQ1
Texas Instruments
IC COMPARATOR 4 DIFF 14TSSOP
SN74LS390NS
Texas Instruments
BIN COUNTR DUAL 4BIT 16SO
SMCJ85A-13-F
Diodes Incorporated
TVS DIODE 85VWM 137VC SMC
XRD64L43AIV-F
MaxLinear, Inc.
IC ADC 10BIT SAR 64LQFP
SN74HC153PW
Texas Instruments
IC MULTIPLEXER 2 X 4:1 16TSSOP
1N3006B
Solid State Inc.
DO4 10 WATT ZENER DIODES
ADP1740ACPZ-1.2-R7
Analog Devices Inc.
IC REG LINEAR 1.2V 2A 16LFCSP -

EMK212BJ105MG-T
Taiyo Yuden
CAP CER 1UF 16V X5R 0805
S29GL256P90FAIR10
Cypress Semiconductor Corp
NOR FLASH PARALLEL 3.3V 256M-BIT
PIC16C62B-04/SP
Microchip Technology
IC MCU 8BIT 3.5KB OTP 28SPDIP
DAC10GS
Analog Devices Inc.
IC DAC 10BIT A-OUT 18SOIC
AOTF9N90
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 900V 9A TO220-3F
STGW40NC60W
STMicroelectronics
IGBT 600V 70A 250W TO247
AO6601L
Alpha & Omega Semiconductor Inc.
MOSFET P-CH 30V 6TSOP
ISL8485IB-T
Intersil
IC TRANSCEIVER HALF 1/1 8SOIC
TPS799L54YZYR
Texas Instruments
IC REG LINEAR 5.4V 200MA 5DSBGA
UNR9111J0L
Panasonic Electronic Components
TRANS PREBIAS PNP 125MW SSMINI3
2N3771
Solid State Inc.
TRANS NPN 40V 30A TO3
FODM124R2
Fairchild Semiconductor
TRANSISTOR OUTPUT OPTOCOUPLER, 3
1808HA220MAT1A
KYOCERA AVX
CAP CER 22PF 3KV NP0 1808
SMAJ6.0CA
Taiwan Semiconductor Corporation
TVS DIODE 6VWM 10.3VC DO214AC
THS4022IDGNR
Texas Instruments
IC OPAMP VFB 2 CIRCUIT 8HVSSOP
NCP1117DT18RK
onsemi
IC REG LINEAR 1.8V 1A DPAK
SP1255PUTG
Littelfuse Inc.
TVS DIODE 4VWM 8.5VC 6UDFN
1812WA221KAT1A
KYOCERA AVX
CAP CER 220PF 2.5KV C0G/NP0 1812 -
UMK212ABJ225MG-T
Taiyo Yuden
CAP CER 2.2UF 50V X5R 0805
ATMEGA8-16AU
Atmel
IC MCU 8BIT 8KB FLASH 32TQFP
TE505S16-25LC
Rochester Electronics, LLC
TE512S16 - TRISCEND E5 CUSTOMIZA
RT2872GSP
Richtek USA Inc.
IC REG BUCK ADJUSTABLE 3A 8SOP
HA4404BCB
Intersil
4 X 1 VIDEO XPOINT SWITCH
BQ2084DBTR-V123
Texas Instruments
IC GAS GAUGE FOR BQ29312 38TSSOP
STMUX1000LQTR
STMicroelectronics
IC MUX/DEMUX 16X8 56QFN
08055A272JAT2A
KYOCERA AVX
CAP CER 2700PF 50V C0G/NP0 0805
NTSJ30120CTG
onsemi
DIODE ARRAY SCHOTTKY 120V TO220F
MAX3795ETG+T
Analog Devices Inc./Maxim Integrated
IC LASER DRV 4.25GB 3.63V 24TQFN
AT49BV040A-90TU
Microchip Technology
IC FLASH 4MBIT PARALLEL 32TSOP
AOZ8206DI-05
Alpha & Omega Semiconductor Inc.
TVS DIODE 5VWM 9VC 6DFN
FLZ27VC
onsemi
DIODE ZENER 26.3V 500MW SOD80
FAN5400UCX
Fairchild Semiconductor
IC BATT CHG LI-ION 1CELL 20WLCSP
MC78L06ACP
Fairchild Semiconductor
FIXED POSITIVE STANDARD REGULATO
LD2981CU33TR
STMicroelectronics
IC REG LINEAR 3.3V 100MA SOT89-3
DSPIC33EP512GM604-I/PT
Microchip Technology
IC MCU 16BIT 512KB FLASH 44TQFP
GRM0225C1E8R4DDAEL
Murata Electronics
CAP CER 8.4PF 25V C0G/NP0 01005